Making Safe Vehicles: Initiatives in the Aerospace Business
Our Approach
SUBARU has created a future vision and technology roadmap for obstacle detection and avoidance systems and lightning-resistant technology with the aim of developing safety technology for aircraft to detect and avoid obstacles and lightning strikes. Moving forward, we will continue to provide safety and peace of mind in the skies through our obstacle detection and avoidance systems and lightning-resistant technology.
Initiatives
Obstacle Detection and Avoidance System
Factors contributing to helicopter collisions include contact with obstacles below or behind the aircraft that are not visible to the pilot, contact with linear obstacles such as power lines and wires that are difficult for the pilot to see, and contact with obstacles in poor visibility conditions such as rain or fog. Various safety devices are incorporated into helicopters, enabling them to detect a range of hazards. However, even with these devices, they may not cover all potential risks.
Therefore, SUBARU is conducting research and development on an obstacle detection and avoidance system that detects dangerous obstacles during flight, alerts pilots to hazards with intuitive displays and warning sounds, and enables them to safely avoid obstacles, with the aim of achieving zero helicopter accidents caused by collisions with obstacles.
By FYE March 2026, we plan to commercialize a system that alerts pilots to obstacles around the aircraft during search and rescue missions. Currently, we are working on the next step, which involves detecting obstacles in poor visibility and detecting linear obstacles while the aircraft is moving forward. Furthermore, we aim to commercialize an autopilot-assisted system that automatically avoids obstacles when approaching them.

Research on Lightning Avoidance Systems for Aircraft and Next-Generation Mobility
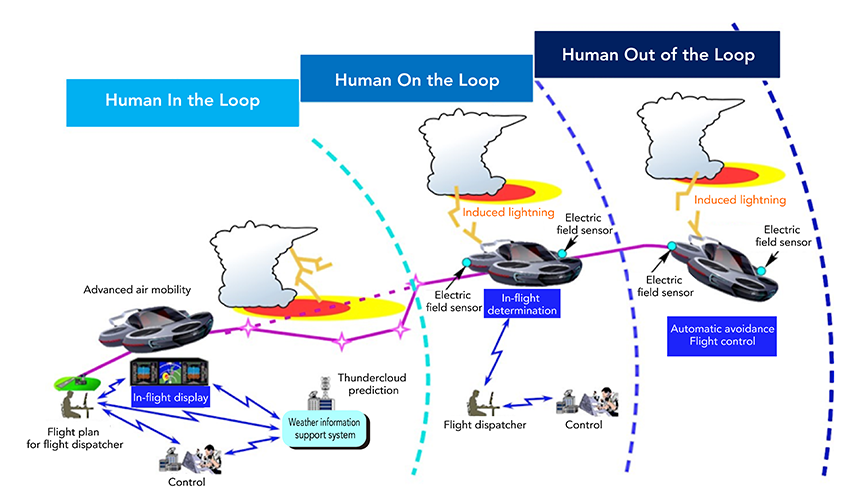
In recent years, there has been a growing emphasis on the development of advanced air mobility projects, such as flying cars and drone deliveries, contributing to a potential increase in airborne mobility. However, as cars also take to the skies, approaching thunderclouds can lead to an increase in electric fields, raising the potential for lightning strikes. Modern aircraft are engineered to maintain safe flight even in the event of lightning strikes. Nevertheless, the areas impacted by lightning strikes necessitate repairs, prompting the pursuit of technologies that either mitigate damage or prevent lightning strikes entirely. SUBARU is actively engaged in research aimed at avoiding lightning strikes, which can also be applied to advanced air mobility solutions.
Weather data may detect the distribution of thunderclouds, but accurately predicting where lightning will strike remains challenging. As a result, there is a growing need for aircraft to possess systems capable of preemptively detecting and avoiding lightning. SUBARU partnered with Japan Aerospace Exploration Agency (JAXA) to conduct experiments and analyses on discharge characteristics concerning aircraft model simulations. This research revealed the potential for variations in the susceptibility of lightning strikes based on the direction of lightning, the aircraft’s angle, and the generation of static electricity on the aircraft. In addition, an algorithm has been developed that uses sensor information installed on the aircraft to predict lightning strikes on the aircraft’s surface. Moving forward, the focus will be on verifying this algorithm and refining it to offer supportive information to pilots. Additionally, the aim is to develop and offer aircraft designed to avoid lightning strikes by controlling the aircraft’s state, encompassing advanced air mobility solutions.
Steps from Lightning Prediction to Lightning Avoidance
Proposed Revision of International Standards for Collision Avoidance of Unmanned Aircraft
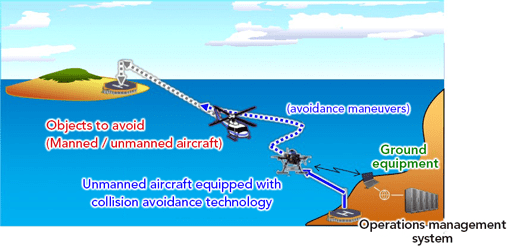
Small unmanned aircraft, commonly referred to as drones, and larger, medium-sized unmanned aircraft are already being used widely in the agricultural sector and other areas, and are also expected to be used for transporting goods during disasters, searching for people in distress, and for logistics infrastructure. However, there have been reports of near misses between unmanned aircraft and manned aircraft such as helicopters in Japan, and how to avoid collisions with other aircraft is an urgent issue toward the safe use of these unmanned aircraft. Collision avoidance is also an indispensable technology for achieving flight outside of line-of-sight and flight over third-party entities, which are key elements for the social implementation of unmanned aircraft.
SUBARU, together with Japan Radio Co., Ltd. and ACSL Ltd. proposed the revision of international standards for the technical operation of collision avoidance procedures between unmanned aircraft and other aircraft, or between unmanned aircraft, based on the results of development in the New Energy and Industrial Technology Development Organization (NEDO)’s Drones and Robots for Ecologically Sustainable Societies project (DRESS project), and this revised standard was adopted and issued by the International Organization for Standardization (ISO).
With the standardization of collision avoidance procedures, systems to detect and avoid other aircraft as a necessary means of avoidance, as well as standardization of testing methods, are expected to further ensure air safety.
Details of International Standard Revision
ISO 21384-3, first published in November 2019, standardized operational procedures for unmanned aircraft, but did not specify procedures for avoiding collisions with other aircraft or between unmanned aircraft.
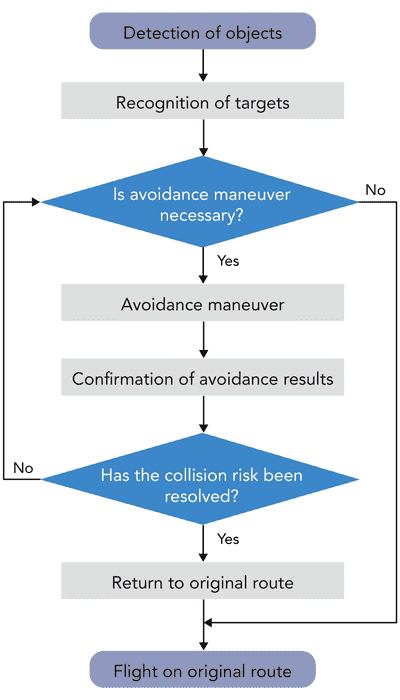
In the new revision, Concept of Operations (CONOPS) for collision avoidance was added as a chapter, which defines the basic procedure consisting of six steps: object detection, target recognition, avoidance maneuvers, confirmation of avoidance results, return to the original route, and flight on the original route. Going forward, this international standard will serve as a guideline for unmanned aircraft, which will follow these six steps and take uniform avoidance actions.