安全なクルマづくり:航空宇宙事業での取り組み
考え方・方針
SUBARUは、障害物や着雷を検知、回避する航空機の安全技術の開発を目的として、障害物検知・回避システムや耐雷技術に関する将来ビジョン、技術ロードマップを策定しています。今後も、障害物検知・回避システムや耐雷技術を通して、空のフィールドにおける安全・安心を提供していきます。
取り組み・実績
~障害物検知・回避システム~
ヘリコプターの接触事故の要因として、パイロットから視認できない機体の下方や後方の障害物との接触、送電線やワイヤーなどのパイロットが視認し難い線状障害物との接触、雨や霧など悪視程の状況における障害物との接触が挙げられます。ヘリコプターには各種安全装置が搭載されており、様々な危険を検知できるようになっていますが、それでもすべての危険に対応できているわけではありません。
そのため、SUBARUではヘリコプターの障害物接触事故ゼロに向けて、飛行中における危険な障害物を検知し、パイロットが直感的に分かりやすい表示と警報音により危険を知らせ、安全に障害物から回避を行う「障害物検知・回避システム」の研究・開発に取り組んでいます。
2025年度には救難・捜索等のミッション中に機体周囲の障害物との接近を知らせるシステムを商品化し、現在、次のステップとして悪視程での障害物の検知、前進中における線状障害物の検知に取り組んでいます。さらに、将来的には障害物に接近した場合、障害物を自動で回避する自動操縦システムの商品化を目指しています。

航空機および次世代モビリティに向けた「着雷回避システム」の研究
近年、空飛ぶクルマやドローン宅配など空の革命プロジェクト「次世代空モビリティ」開発が盛んとなり、飛行するモビリティが増加する兆しがあります。しかしながら、自動車も空を飛ぶようになると雷雲と近づくことで電界が高まり、着雷する可能性が出てきます。現在の航空機は着雷しても安全に飛行を継続できるように設計されていますが、着雷箇所は修理する必要があるため損傷を抑制、または着雷を回避する技術が求められています。SUBARUでは、次世代空モビリティにも適用できる着雷を回避する研究に取り組んでいます。
気象情報では雷雲分布は検知できても、どこに落雷するかは予測が難しいため、航空機自体が着雷を事前に検知して雷を回避するシステムが求められています。SUBARUは、国立研究開発法人宇宙航空研究開発機構(JAXA)と協力し、機体模型に対する放電の様相を実験・分析したところ、雷の方向と機体の角度、また機体に発生する静電気により、雷の落ちやすさが変わる可能性があることを突き止めました。また、機体に搭載したセンサー情報から、機体への着雷を予測するアルゴリズムを開発しました。今後はこれを検証し、パイロットへ支援情報として提供できるように改良するとともに、次世代空モビリティも含めて機体の状態をコントロールすることによって着雷を回避する航空機を開発・提供していきます。
着雷予測から着雷回避のステップアップ構想

無人航空機の衝突回避に関する国際規格改定の提案
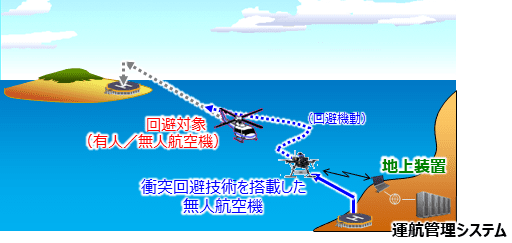
一般にドローンと呼ばれる小型の無人航空機や一回り大きい中型の無人航空機は、既に農業分野などで利用が広がっており、さらには災害時の物資運搬や遭難者捜索、物流インフラなどの用途で大いに期待されています。一方で、無人航空機とドクターヘリなど有人航空機とのニアミス実例が国内で報告されるなど、他の航空機との衝突をどのように回避するかが無人航空機の安全利用における喫緊の課題です。また、無人航空機の社会実装に向けて「目視外飛行」および「第三者上空飛行」を実現するうえでも、衝突回避は欠かせない技術です。
SUBARUでは、NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の「ロボット・ドローンが活躍する省エネルギー社会の実現プロジェクト」で開発の成果をもとに日本無線株式会社、株式会社ACSLと共同で、無人航空機と他の航空機、あるいは無人航空機同士の衝突回避手順の技術運用の標準化に向け、国際規格改定を提案し、国際標準化機構(ISO)で採択・発行されました。
衝突回避手順の標準化を受け、回避に必要な手段として、他の航空機を探知し回避するシステムや、試験方法の標準化が進められ、さらなる空の安全確保が期待できます。
国際規格改定の内容
2019年11月に初版が発行された「ISO21384-3」は、無人航空機の運航手順を規格化したものでしたが、他の航空機や無人航空機同士の衝突回避手順は規定されていませんでした。
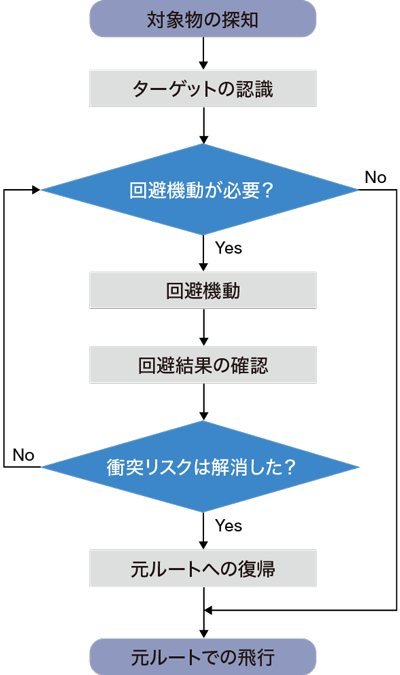
今回の改定で、衝突回避のCONOPS(Concept of Operations:運用構想)を新たな章として追加し、「対象物の探知」「ターゲットの認識」「回避機動」「回避結果の確認」「元ルートへの復帰」および「元ルートでの飛行」の6ステップからなる基本的な手順を規定しました。今後、無人航空機は、この6ステップに従い、統一された回避行動をとることが国際規格となります。